PDS Das Mehrkanal-Ladesystem -1 (im Folgenden als Prüfmaschine bezeichnet) gehört zu der Reihe dynamischer und statischer Universalprüfmaschinen, die von unserem Unternehmen entwickelt wurden.
1. Produkteinführung
Das Mehrkanal-Ladesystem PDS-1 (im Folgenden als Prüfmaschine bezeichnet) ist eines der von unserem Unternehmen entwickelten Produktserien dynamischer und statischer Universalprüfmaschinen. Während des Entwicklungs- und Entwicklungsprozesses der Prüfmaschine übernimmt das Unternehmen die Entwicklungs- und Fertigungserfahrung des international bekannten Unternehmens für dynamische Prüfmaschinen, übernimmt das Entwicklungskonzept „Vereinheitlichung, Modularisierung und Standardisierung“ und übernimmt die international fortschrittliche elektromagnetische dynamische Prüfmaschinentechnologie und ist auf die tatsächliche Nutzungssituation von Privatanwendern ausgelegt.
Prüfmaschinen-Host, elektrischer Schaltschrank, volldigitaler Servocontroller, Mehrkanal-Spezialsteuerungssoftware und andere Schlüsselkomponenten werden von unserem Unternehmen entwickelt und hergestellt, Netzteil, Touchscreen-Modul, Schütz und andere wichtige Zukaufteile Es handelt sich um ausgewählte internationale oder inländische ähnliche Produkte der bekannten Marke, die die Stabilität und Zuverlässigkeit des Systems erheblich verbessern.
1) Systemübersicht
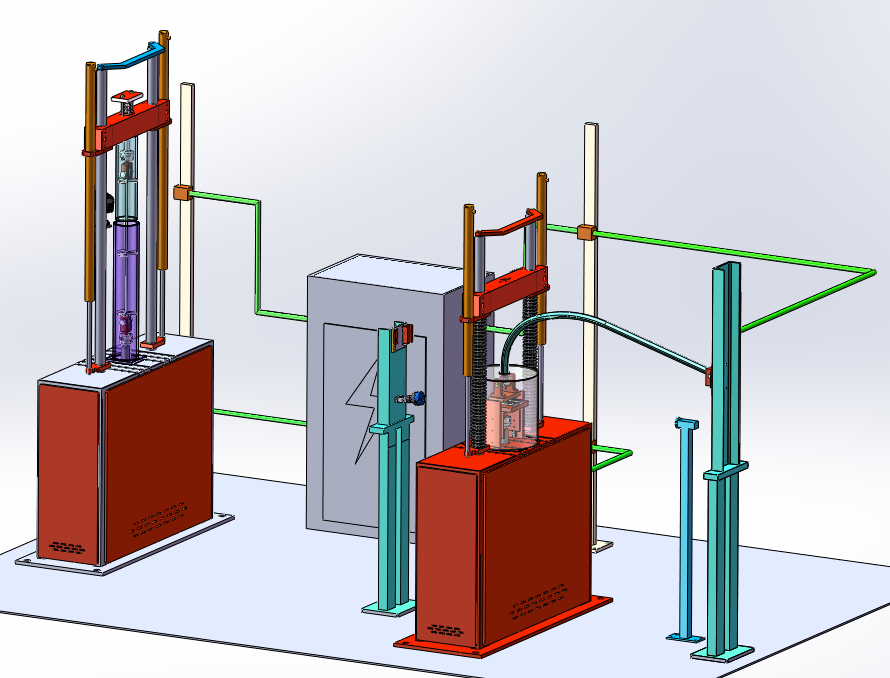
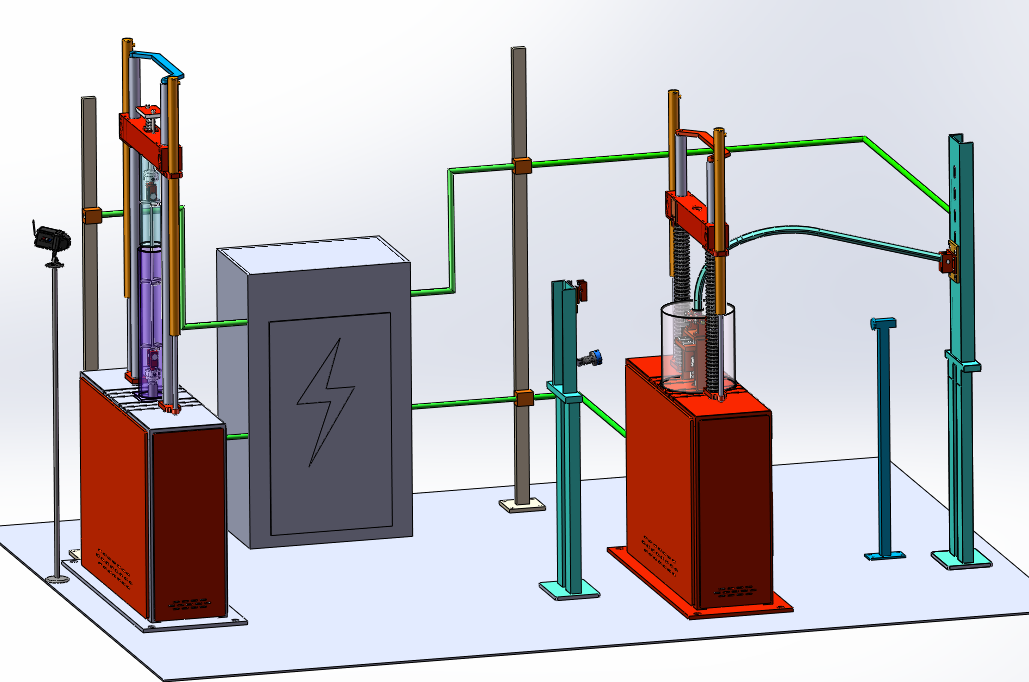
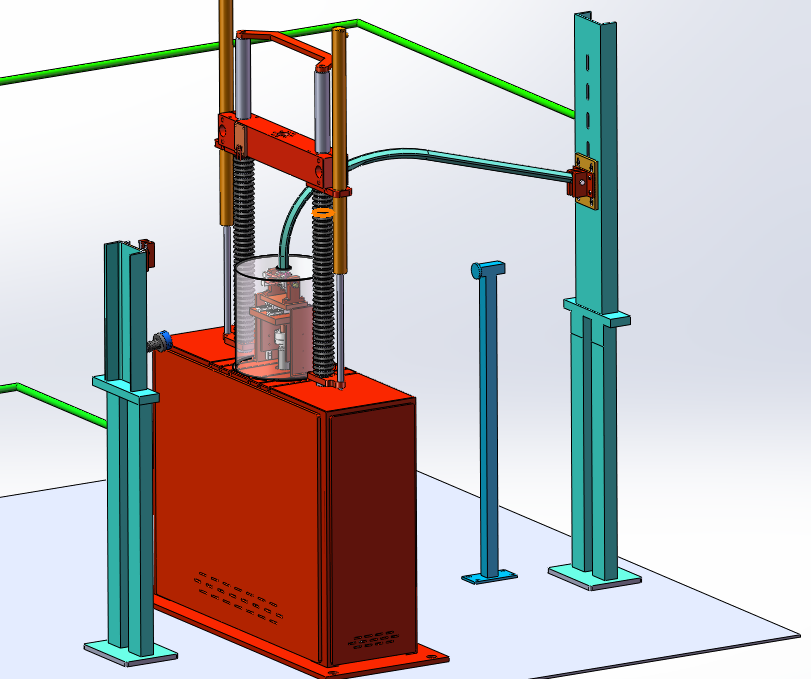
Das Mehrkanal-Belastungssystem PDS-1 wird für den Ermüdungstest des aufgehängten Strangs von Hochgeschwindigkeitsbahnen verwendet. Die Prüfmaschine besteht aus einer Hauptmaschine (1KN elektromagnetischer Linearantrieb oben und unten gegenüberliegend), Prüfzubehör, Stromquelle, Isolationsschutzvorrichtung, seitlicher Lastladevorrichtung, komplettem Leistungsschrank, volldigitalem Einkanal-Servosteuerungssystem und Computerdrucker , Testsoftware und anderes notwendiges Zubehör.

1.1 Das Funktionsprinzip des Systems ist wie folgt:
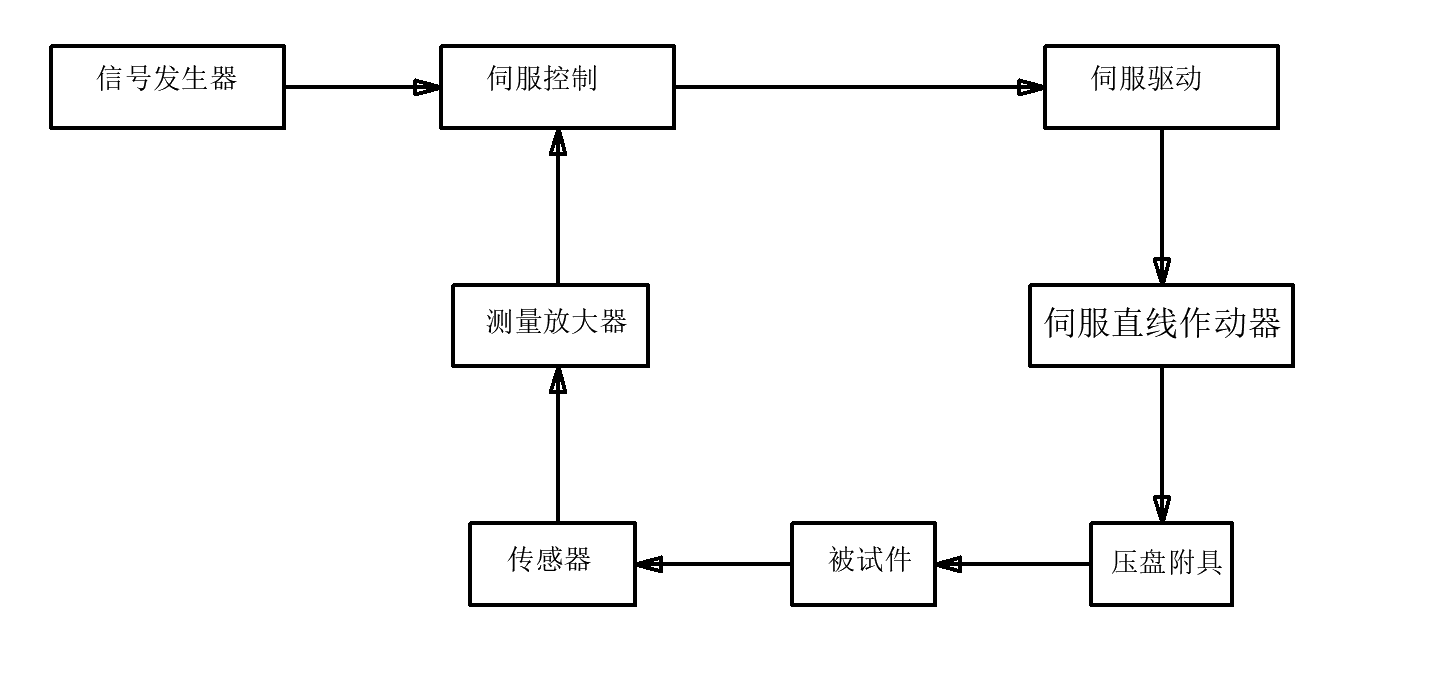
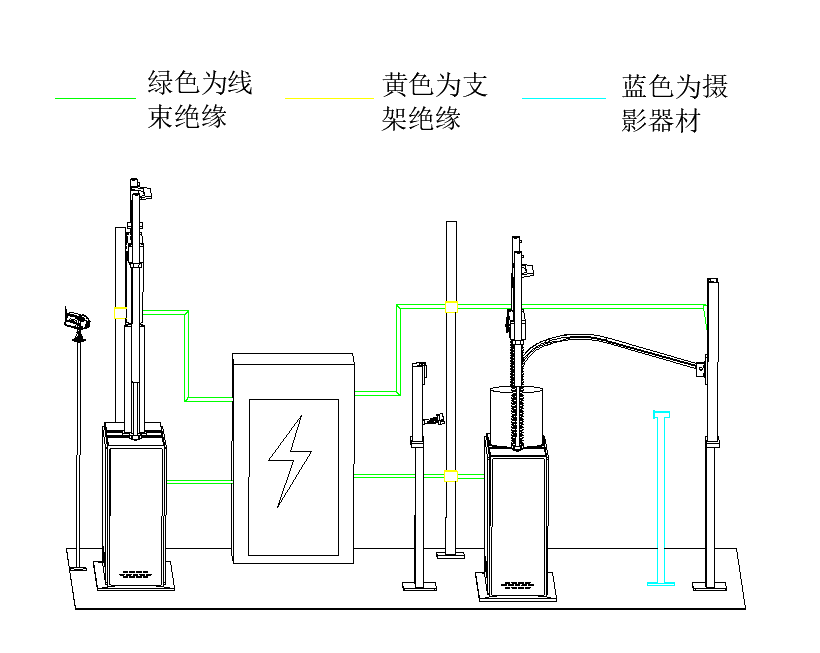
1.2 Das Blockdiagramm der Systemsteuerung sieht wie folgt aus:
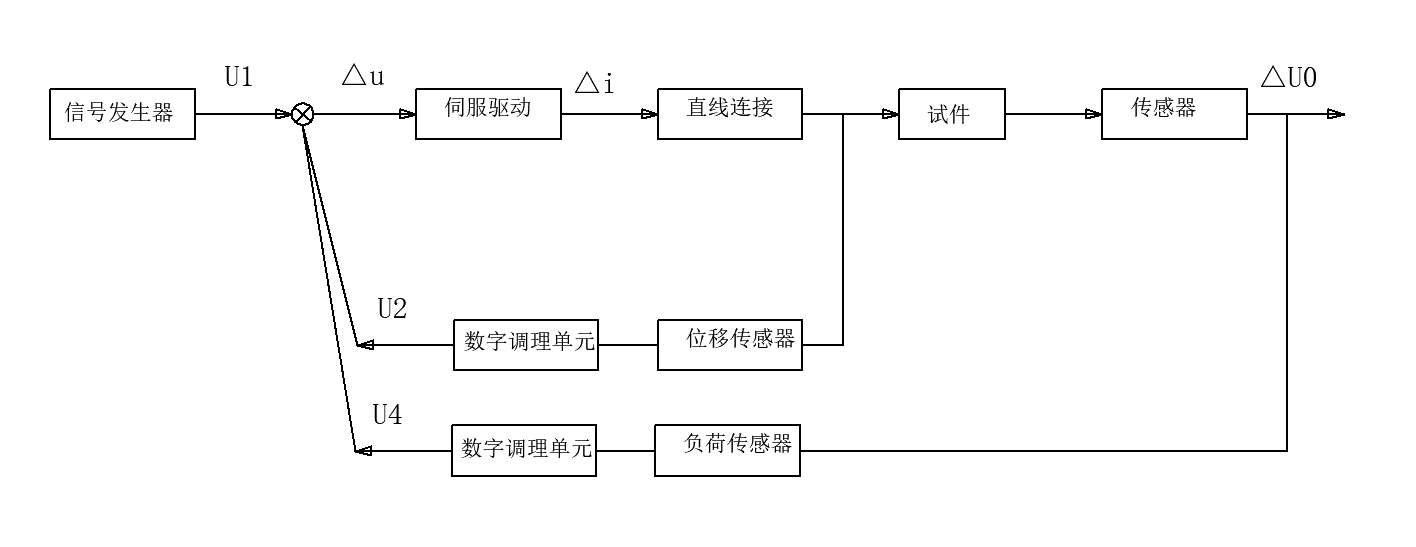
(Das schematische Diagramm dient nur als Referenz)
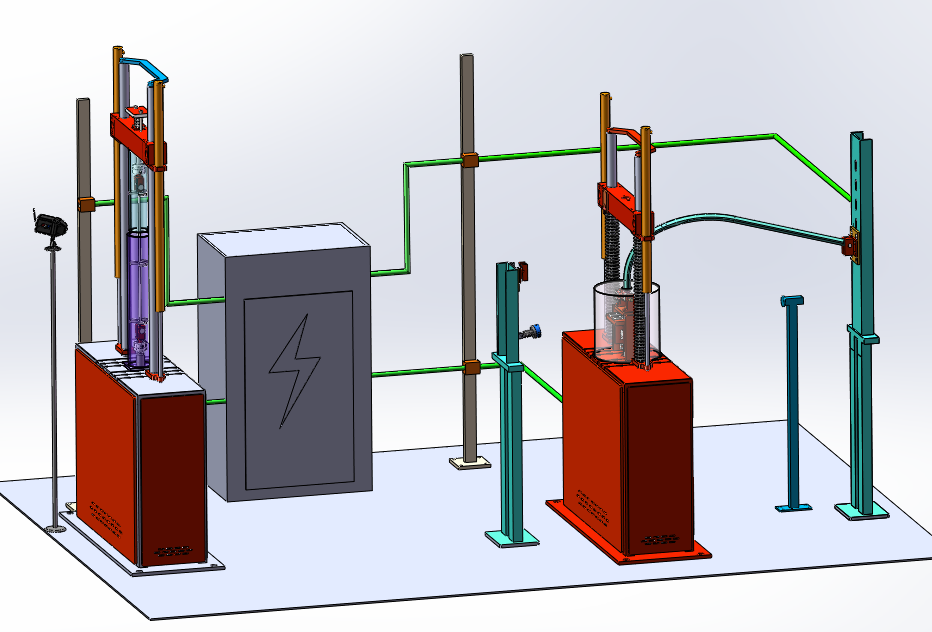
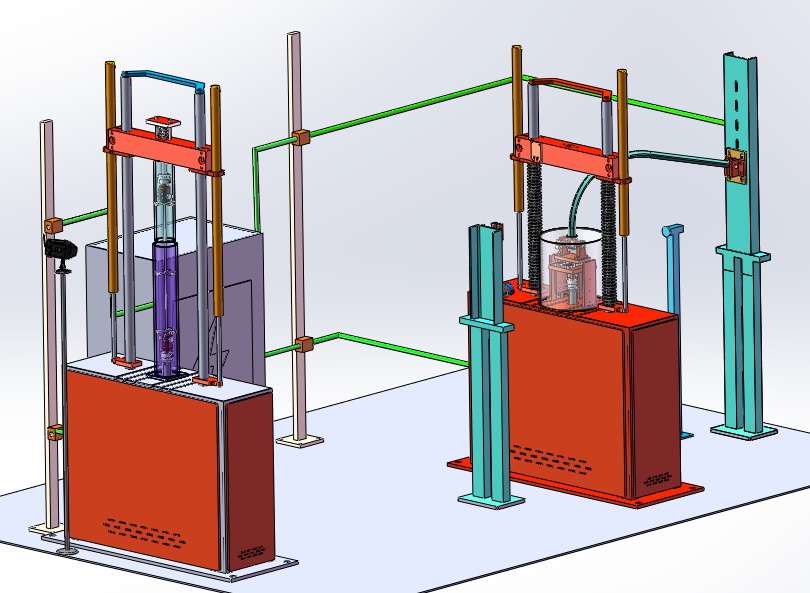
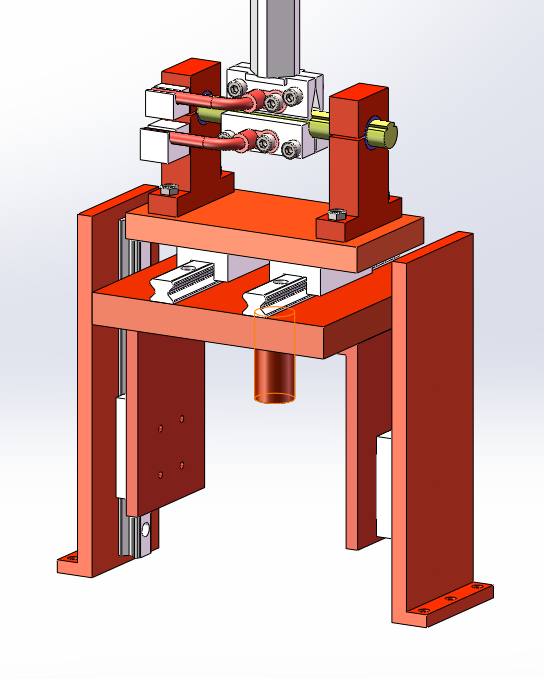
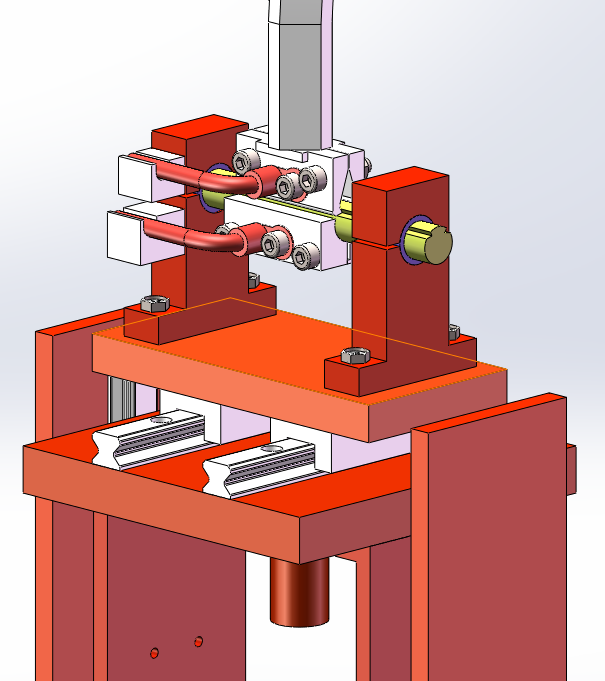
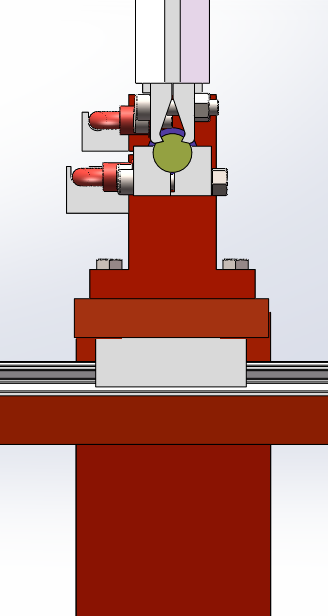
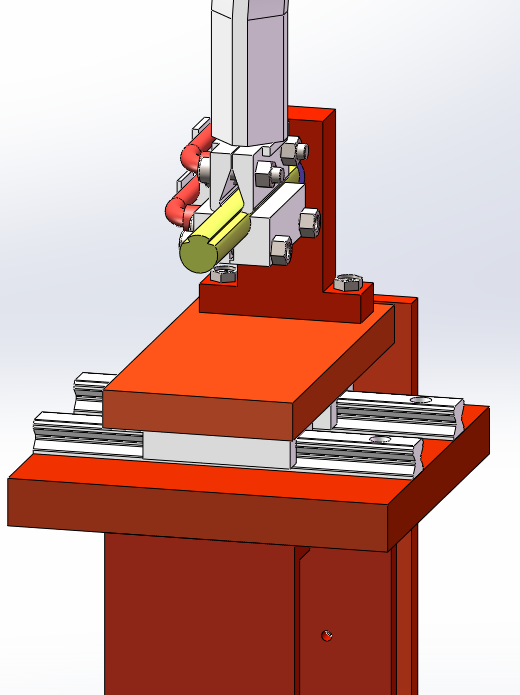
1.3 Systemhosts Referenzbilder sind wie folgt
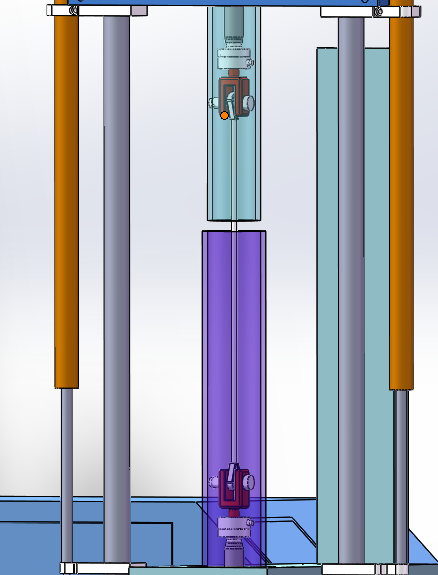
1.4 Die Hauptmaschine ist eine 2-Säulen-Rahmenkonstruktion, und der elektromagnetische Linearantrieb 1KN ist am Hauptmaschinenträger und am unteren Teil der Werkbank installiert. Die Prüfvorrichtung wird jeweils oben auf den beiden Kolbenstangen des Aktuators montiert. Bei der Einstellung des Trägerbalkens werden elektrisches Heben, mechanische Klemmung und eine elastische Freigabestruktur verwendet, um sicherzustellen, dass der Träger während des Tests stabil und zuverlässig ist und um sicherzustellen, dass der Träger im Nicht-Testzustand verriegelt bleibt. Die Außenfläche der Säule ist mit Hartverchromung behandelt, wodurch die Verschleißfestigkeit der Säule effektiv erhöht, die Korrosionsbeständigkeit verbessert und die Schönheit des Hauptkörpers erhöht werden kann.
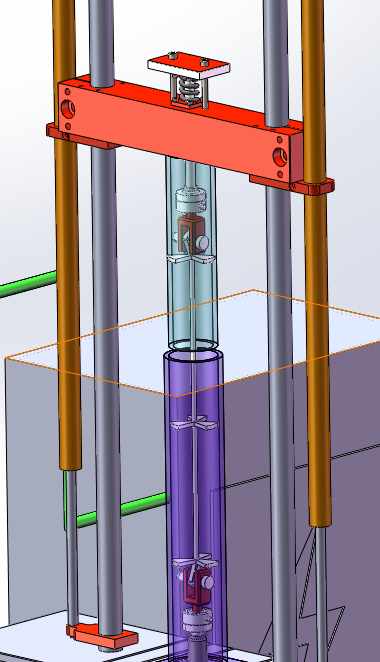
1.5 Die Bewegung des Balkens (Anheben und Verriegeln) wird durch das Balkenantriebsmodul gesteuert, zwei Spannvorrichtungen und zwei Leitspindeln werden koordiniert, um die Arbeit abzuschließen, und das Antriebsmodul übernimmt eine manuelle Ventilsteuerung, keine Leckage , bequem und zuverlässig.
1.6 Der Lastsensor ist zur Messung der Prüflast an der Stirnseite der Kolbenstange angebracht. Die Isolationsschicht ist am Anschluss reserviert.
(Hinweis: 1 Aufhängungssensor ist am oberen Teil des Hauptmotors installiert und 2 Drahtklemmen sind am Ende der Kolbenstange installiert)
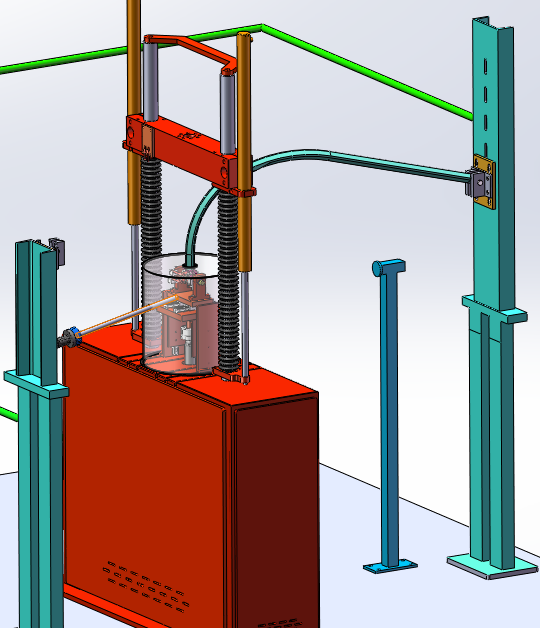
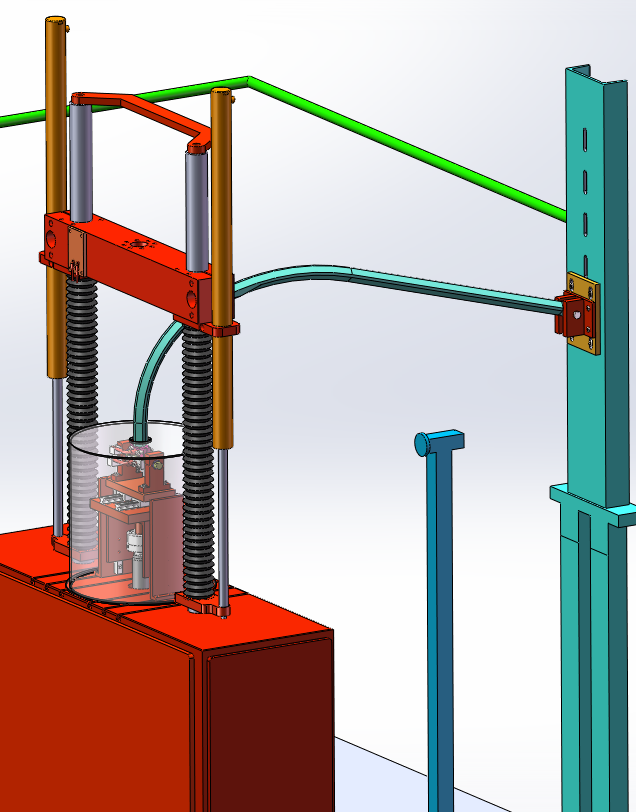
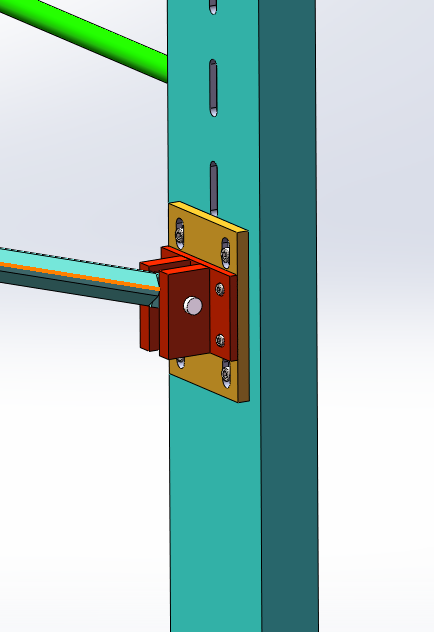
1.7 Um zu verhindern, dass der Leiter während des Tests herunterfällt oder sich durch Vibration löst, ist die gesamte Maschine mit einer Kabelumwandlungshalterung ausgestattet, um die oben genannte Situation zu verhindern. Bei der Installation vor Ort verbindet das Leistungsmodul das Hauptkabel über eine Standardbrücke mit der Verkabelungshalterung in der Nähe des Geräts, und die Halterung und die Probe werden über eine bestimmte Kabellänge (hochflexibles Kabel) verbunden.
Wie in der Abbildung gezeigt
1.8 Zuverlässigkeit und Sicherheit:
1) Feste Isolierung: Halten Sie den Teststrang während der Vibration unter Strom, ohne dass er herunterfällt. Decken Sie das freiliegende Metall der oberen Balkenkomponenten, der Werkbankkomponenten und der unteren Endplattform mit einer Isolierfolie ab (im Bild ist die Folie rot). Verwenden Sie einen runden Schild, um die Säulen auf beiden Seiten zu schützen, ohne das Anheben des Trägers zu beeinträchtigen. Der Kabelbaum sollte befestigt sein und an vielen Stellen sollten Isoliermaterialien verwendet werden, um Isolationsschutzmaßnahmen gegenüber anderen Geräteteilen zu ergreifen.
2) Die Zugstange wird mit Bolzen am Balken befestigt, und die Isolierhülse wird zwischen Zugstange und Balken verwendet und die Federvorrichtung wird in der Mitte platziert. Wenn die Prüfmaschine arbeitet, muss die Vorspannkraft auf die Feder ausgeübt werden, und die Größe der Vorspannkraft wird durch den festen Bolzen gesteuert (rot ist das mit Isoliermaterial bedeckte Material);
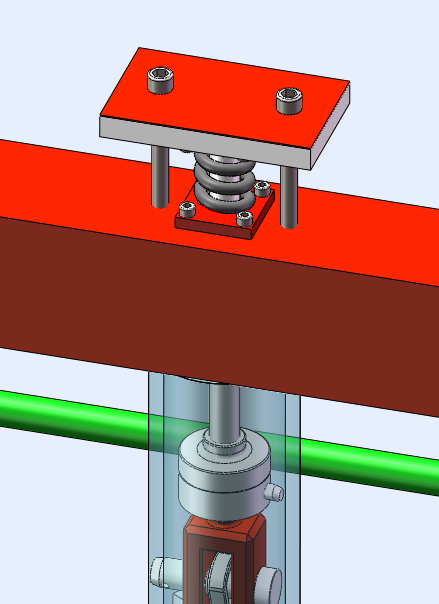
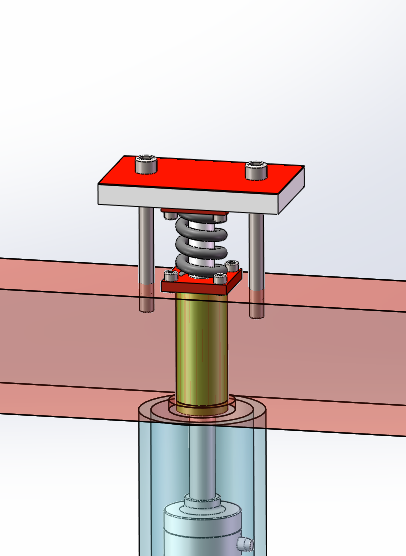
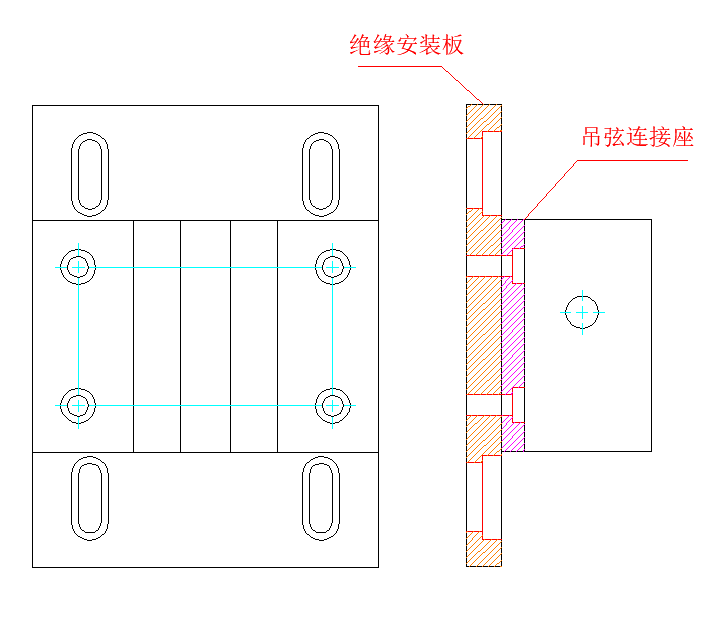
3) Der Verbindungssitz für die hängende Schnur (mit Isolierfolie bedeckt) ist mit einer Isoliermontageplatte verbunden, und das Taillenloch der Isoliermontageplatte kann die Höhe des Verbindungssitzes für den hängenden Bogen anpassen.
4) Leitfähigkeit: Der Nennstrom sollte dem Ausgangsstrom des Stromgenerators entsprechen, ohne dass es zu großen Stromverlusten und Störungen der Stromwellenform kommt.
5) Der Anschlussdraht des Stromerzeugungsgeräts sollte beständig gegen Korrosion, Oxidation und äußere Isolierung sein;
6) Der Verbindungsteil der Ermüdungsprüfmaschine und der Stromerzeugungsvorrichtung erfordert eine hohe mechanische Festigkeit und eine einfache Installation;
7) Kann an den Längenbereich des Inspektionsstrangs angepasst werden (Kontaktlinienoberfläche zur unteren Oberfläche des Kabels): 800–1600 mm;
8) Aktuator, Schiebetisch, Ober- und Unterbalken, mehrere Löcher reservieren, um die Testanforderungen verschiedener Arbeitsbedingungen zu erleichtern. (Der Sensor und die entsprechende Halterung können austauschbar sein)
9) Zwischen dem Drahtklemmenwerkzeug und der Halterung wird eine Schutzvorrichtung für Isoliermaterial angebracht.
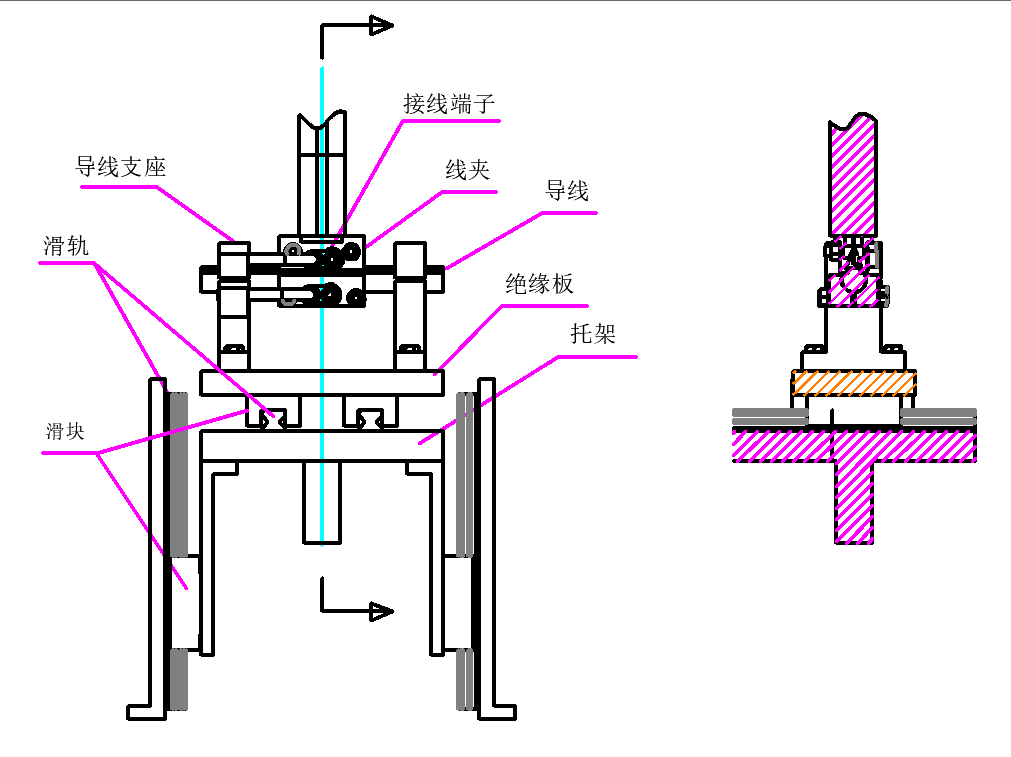
Hinweis: 1. Wenn sich die Halterung nach oben und unten bewegt, bewegen sich die beiden seitlichen Gleitblöcke entlang der vertikalen Gleitschiene nach oben und unten, und die beiden seitlichen Gleitschienen haben keinen Einfluss auf andere Teile.
2. Beim Arbeiten kann sich der Gleitblock unter der Dämmplatte auf der Gleitschiene über der Trägerplatte bewegen
10) Der Draht wird durch die beiden oberen und unteren Drahtklemmen doppelt geklemmt, der Draht und die Halterung sind mit Keramikringen isoliert und die Metallteile sind mit Isolierfolie bedeckt (rot in der Abbildung ist die Isolierung). Film).
11) Die Kabelklemme wird durch Bolzen verriegelt, die Klemmverbindung ist isoliert und der Kabelbaum ist an der festen Position der Kabelklemme befestigt.
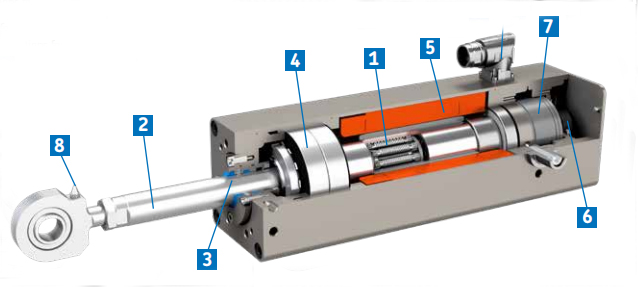
2. Aktuator:
2.1 Der elektromagnetische Linearantrieb ist die Kernkomponente der Prüfmaschine und gibt Leistung über den Antrieb ab. Es wurde mit eigener Technologie entwickelt und hergestellt und besteht aus einem Antriebskörper, einem elektromagnetischen Steuermodul und einem Sensor.
Grundparameter
Der Betätigungszylinder wird unter dem Tisch platziert.
Maximale dynamische Kraft: ±1150 N.
Maximale statische Kraft: ±1150 N
Effektiver Hub des Aktuators: +/-100 mm (Gesamthub 220 mm);
Maximaler Kompressionshub 110 mm bei 2 Hz
Wenn der maximale Kompressionshub 20 mm beträgt, beträgt die maximale Frequenz 11 Hz,
Die Dauer des Experiments beträgt mindestens 500 W.
Der Aktuator wird mit einem hochpräzisen Laser-Wegsensor von SONY geliefert,
Die Grenzposition der Aktuatoramplitude ist als Puffer ausgelegt, um zu verhindern, dass der Antrieb außer Kontrolle gerät und Schäden verursacht.
Das System übernimmt die Anti-Spiel-Vorrichtung, der Kraftwert wird automatisch zentriert, die Seitenkraft wird reduziert, die Auswirkungen des Hochfrequenz-Spannungstests werden reduziert und die Testwellenform wird verbessert.
2.2 An der Verbindungsschraube zwischen dem Lastsensor und dem Spannfutter sowie der Kolbenstange und dem Spannfutter sind spezielle Vorrichtungen zur Spielbeseitigung vorgesehen, um die dynamische Reaktionsleistung weiter zu verbessern.

3. Testzubehör
Eine spezielle Keramikvorrichtung wird für den Ermüdungstest der hängenden Schnur verwendet.
Die wichtigsten Teile wie die Druckscheibe werden mit einer speziellen Technologie behandelt, die sich durch hohe Härte und gute Verschleißfestigkeit auszeichnet (keine Isolierung).
Die Positionierungsschutzvorrichtung sorgt für die Sicherheit der Aufhängeschnur während des Ermüdungstests, sorgt dafür, dass die Aufhängeschnur während des Tests bricht und das gebrochene Ende nicht springt, verhindert, dass das gebrochene Ende irgendeine Position berührt Geräte und verhindert Stromschläge.

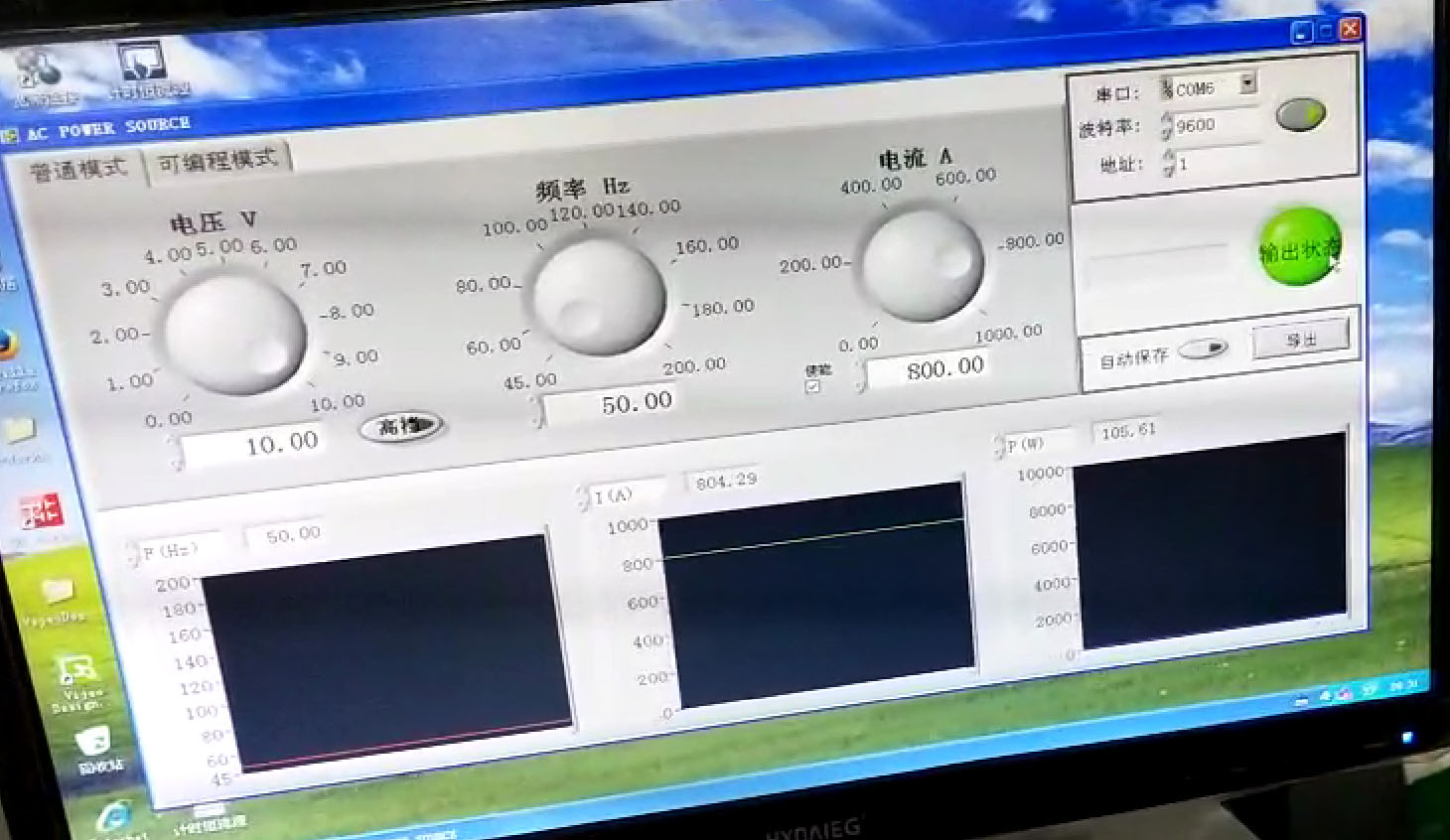
4. Stromerzeugungsgerät
1) Stromversorgung: AC 220 V/AC 380 V 50 Hz;
2) Ausgangsstrom 0~1050A AC (Standard-Sinuswelle) /DC, der niedrigste Ausgangsstrom erreicht 300A, Stromgenauigkeitsfehler ≤±0,5 %;
3) Ausgangsspannung 0-10 VDC, Genauigkeitsfehler ≤±0,5 %;
4) Die Wellenform des Ausgangsstroms ist einstellbar, die Ladefrequenz ist einstellbar und der wahre Effektivwert des Stroms ist kontinuierlich einstellbar;
5) Das Gerät sollte sicherstellen, dass es im Testprozess weiterarbeiten kann, mit unabhängiger Steuerung von Einschalt-, Ausschaltzeit und Steuerzeit mit einer Mindestauflösung von 1 ms;
6) Mit Echtzeit-Wellenformanzeige, Einschaltzeiteinstellung, Ausschaltzeiteinstellung und kann am Ende des Tests (Probenbruch) unabhängig ausgeschaltet werden oder über andere schützende Isolationsmaßnahmen verfügen;
7) Das aktuelle Design der Wellenformverzerrung sollte den entsprechenden nationalen Standards und Industriestandards entsprechen;
8) Die Ausgangs-Wechselstromfrequenz sollte mit dem tatsächlichen Feld übereinstimmen, 50 Hz;
9) Das Gerät sollte die Funktion von Überstrom und Überspannung haben;
10) Kann die aktuelle Aktionszeit der hängenden Schnur messen und die Verriegelungsaktionszeit synchron aufzeichnen;
Softwareteil:
11) Dynamische Stromkurve, Funktion zur Anzeige der Durchschnittsstromkurve (RMS), Echtzeitanzeige des maximalen und minimalen Spitzenstroms, historische Stromspitzenaufzeichnung.
Detaillierte Parameter:
| Produktionsmethode | SPWM | |
| EINGANG | Phasen | 3φ4W |
| Spannung | 380 V ± 10 % | |
| Häufigkeit | 47HZ-63HZ | |
| AUSGANG | Phasen | 1φ2W |
| Spannung Konstantstromquelle | 10 V (Öffnungsspannung) | |
| Strom gibt die Konstantstromquelle an | 0~1000A Einstellbar | |
| Häufigkeit | 45 Hz ~ 200 Hz | |
| Verkabelung | Kupferbandgewinnung | |
| Schutz | Elektronische Schaltung erkennt schnell Überstrom, Überspannung, Übertemperatur, automatische Abschaltung, Nicht-Testzustand VA=0 | |
| LED-Anzeige | Spannung Vms, Strom Aeff, Frequenz Fre, Leistung Wattzahl, Leistungsfaktor PF | |
| Leistungsanpassungsverhältnis | 0,1 % | |
| Lastanpassungsrate | 0,5 % FS | |
| Wellenformverzerrungsrate | 3 % (reine ohmsche Last) | |
| Frequenzregelung | 0,01 % | |
| Spannungsauflösung | 0,1 V | |
| Aktuelle Auflösung | 0,1(A) | |
| Frequenzauflösung | 0,1 Hz | |
| Messgenauigkeit | Spannung | 0,5 % FS+5 dgt |
| Aktuell | 0,5 % FS+5 dgt | |
| Wattzahl | 0,5 % FS+5 dgt | |
| Häufigkeit | 0,01 % FS+5 dgt | |
| Genauigkeit einstellen | Aktuell | 0,5 % FS |
| Häufigkeit | 0,3 %FS | |
| Schutz | Überstrom; Übertemperatur; Überlastung | |
| Umgebung | Temperatur: 0℃-45℃; Relative Luftfeuchtigkeit: 0–90 % (nicht kondensierender Zustand); Höhe: 1500 m | |
| Isolationsreaktanz | 500 V DC 20 MQ oder höher | |
| Spannungsisolierung | 1800 VAC/5 mA/1 Minute | |
| Kühlmodus | Zwangskühlung durch Lüfter | |
| B*H*T(mm) | B:550 H:700 ohne Rolle T700 | |
| Effizienz | ≥98 % | |
| Lärm | ≤60DB(1m) | |
| Schutzstufe | IPX20 | |
5. Steuerungssystem:
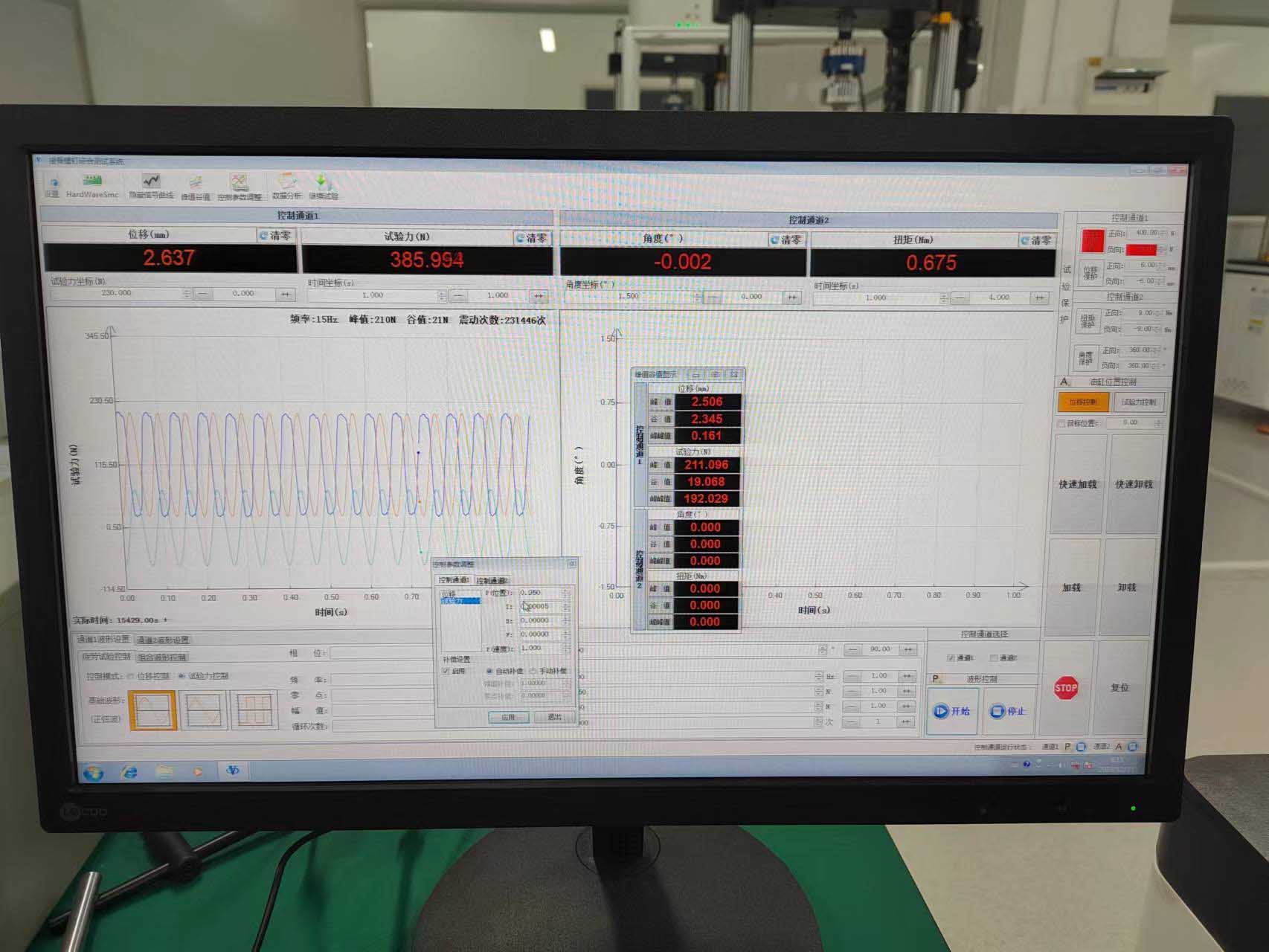
5.1 Anzahl der Steuerkanäle: 2, einschließlich drei geschlossener Regelkreise für Prüfkraft, Prüfverschiebung und Prüfverformung, mit ungestörter, sanfter Schaltfunktion im Steuermodus. Die maximale Aktualisierungsfrequenz der Regeldaten beträgt 1 kHz; Die Auflösung von Controller A/D und D/A beträgt 16 Bit. Signalfrequenzbereich: 0,001 Hz ~ 100 Hz; Wellenform des Signalgenerators: Sinuswelle, Dreieckwelle, Rechteckwelle, Sägezahnwelle usw. Die Servoantriebseinheit wird zum Antrieb des Linearmotors verwendet; Remote-Servo-Aktivierungssteuerungsfunktion zur Fernsteuerung der Antriebsleistung des Linearmotors; Der Controller verfügt über die Funktion der Grenzparametereinstellung und der vollständigen Schutzfunktion. Zusätzlich zum Überlastschutz (110 %) und zum sekundären Überstromschutz verfügt es auch über einen willkürlichen dynamischen Lastschutz, einen statischen Lastschutz, einen Frequenzschutz usw.
5.2 Steuerungssoftware für dynamische Prüfmaschinen (Systeme): Systemverwaltungssoftware: Die Software ist die Grundlage des gesamten digitalen Servocontrollers. Ihre Hauptfunktionen bestehen darin, die Hardwareressourcen des Steuerungssystems zu verwalten, den Sensor zu definieren, Passen Sie die digitalen Steuerparameter an, stellen Sie den Schutz ein, zeigen Sie den aktuellen Steuermodus sowie den Status des Funktionsgenerators und die Sensorkalibrierung an. Das Dual-Trace-Digitaloszilloskop, das digitale Servoamperemeter und 6 digitale Voltmeter dienen zur Echtzeitanzeige der Testdaten. Funktionsgenerator-Software: Die Software wird hauptsächlich für dynamische Tests mit konstanter Amplitude verwendet, beispielsweise für Ermüdungstests mit konstanter Amplitude. Die Funktionsgeneratorsoftware verfolgt und korrigiert automatisch die Spitzen- und Talwerte der Steuergröße (z. B. Last), um sicherzustellen, dass der typische dynamische Fehlerwert jeder Spitze während des gesamten Testprozesses ±0,5 % FS beträgt. Während des Tests kann der Bediener Spitzenwert, Tiefpunkt und Frequenz dynamisch ändern und außerdem eine manuelle oder automatische Signalhaltung durchführen. Wenn das automatische Signalhaltezyklusintervall eingestellt ist, hält die Software jedes Mal, wenn die Anzahl der Testzyklen um ein Zyklusintervall erhöht wird, das Signal automatisch auf einem festgelegten Pegel, um die Messung einiger Testdaten (z. B. sichtbare Risslänge) zu erleichtern. . Die optionalen Wellenformen der Software sind Sinuswelle, Dreieckwelle, Rechteckwelle, Schrägwelle, Sägezahnwelle, kombinierte Welle, kombinierter Schrägwellentest. Am Ende des Tests speichert die Software einige wichtige Daten, wie z. B. Testlast, Häufigkeit, Anzahl der Zyklen und Testzeit. Die Software kann auch einfache statische Tests durchführen. Multifunktionale Testsoftware: Bei der Software handelt es sich um eine flexible, voll funktionsfähige Testsoftware, Anwender können damit spezielle Testmethoden entwerfen, müssen aber nicht programmieren. Diese Software verfügt über eine Vielzahl von Steuerfunktionen, Datenerfassungsfunktionen und anderen Hilfsfunktionen des Servocontrollers, die auf einem Panel in Form von ICONS ausgeführt werden. Benutzer können diese Funktions-ICONS per Drag & Drop mit der Maus in das Testdefinitionspanel ziehen und kombinieren Sie können sie entsprechend den Benutzeranforderungen nach Belieben testen und nach benutzerdefinierten Testmethoden testen.
Funktionsgenerator-Software: Die Software wird hauptsächlich für dynamische Tests mit konstanter Amplitude verwendet, z. B. Ermüdungstests mit konstanter Amplitude, Ermüdungsrisswachstumstests mit konstanter Amplitude usw. Die Funktionsgenerator-Software verfolgt und korrigiert automatisch die Spitzen und Täler Werte der Kontrollgröße (z. B. Last), um sicherzustellen, dass der typische dynamische Fehlerwert jedes Peaks während des gesamten Testprozesses ±0,5 % FS beträgt. Während des Tests kann der Bediener Spitzenwert, Tiefpunkt und Frequenz dynamisch ändern und außerdem eine manuelle oder automatische Signalhaltung durchführen. Wenn das automatische Signalhaltezyklusintervall eingestellt ist, hält die Software jedes Mal, wenn die Anzahl der Testzyklen um ein Zyklusintervall erhöht wird, das Signal automatisch auf einem festgelegten Pegel, um die Messung einiger Testdaten (z. B. sichtbare Risslänge) zu erleichtern. . Die optionalen Wellenformen der Software sind Sinuswelle, Dreieckwelle und Rechteckwelle. Nach dem Test speichert die Software einige wichtige Daten, wie z. B. Testlast, Häufigkeit, Anzahl der Zyklen und Testzeit. Die Software kann auch einfache statische Tests durchführen.
Multifunktionale Testsoftware: Die Software ist eine flexible, voll funktionsfähige Testsoftware, Benutzer können damit spezielle Testmethoden entwerfen, müssen aber nicht programmieren. Diese Software verfügt über eine Vielzahl von Steuerfunktionen, Datenerfassungsfunktionen und anderen Hilfsfunktionen des Servocontrollers, die auf einem Panel in Form von ICONS ausgeführt werden. Benutzer können diese Funktions-ICONS per Drag & Drop mit der Maus in das Testdefinitionspanel ziehen und kombinieren Sie können sie entsprechend den Benutzeranforderungen nach Belieben testen und nach benutzerdefinierten Testmethoden testen.
5.3. Technische Parameter des Controllers:
5.3.1 Volldigitale universelle Signalaufbereitungseinheit: Testkraft, Weg-Regelkreis.
5.3.2 Die maximale Aktualisierungsfrequenz für Regeldaten beträgt 10 kHz.
5.3.3 Die A/D-Auflösung des Controllers beträgt 18 Bit und die D/A-Auflösung beträgt 16 Bit.
5.3.4 Signalfrequenzbereich: 0,01 Hz ~ 100 Hz.
5.3.5 Signalgenerator-Wellenform: Sinuswelle, Dreieckwelle, Rechteckwelle, Programmwelle.
5.3.6 Kann eine halbperiodische Verschiebungssteuerung, eine halbperiodische Kraftsteuerung oder eine kundenspezifische Wellenform realisieren, um andere Tests der Probe durchzuführen
5.3.7 Regelgenauigkeit: Die statische Regelgenauigkeit beträgt 0,3 % FS und die typische dynamische Regelgenauigkeit beträgt 0,5 % FS.
5.3.8 Remote-Servo-Start- und Stopp-Steuerfunktion.
5.3.9 Zählerkapazität: Unbegrenzte Zeiten.
5.3.10 Weitere notwendige I/O-Ein- und Ausgabeeinheiten: vier analoge Eingänge, vier analoge Ausgangsschnittstellen; Vier digitale Eingangs- und vier digitale Ausgangsschnittstellen (optional).
6. Weitere Konfigurationen und notwendiges Zubehör:
Reaktionsrahmen zur Kalibrierung des Lastsensors;
Komprimierungszubehör konfigurieren;
Mit Schutzschilden,
Passende Vorrichtung und Werkzeug für Aufhängungs- und Drahtklemmentest
7. Wichtigste technische Leistungsindikatoren:
1. Maximale statische Prüfkraft: ±1150 N, statische Anzeigegenauigkeit:, Anzeigegenauigkeit von 5 % pro Datei ±0,5 %;
2. Maximale dynamische Testkraft: ±1150 N; Dynamische Volatilität: nicht mehr als ±0,5 %FS.
3. Maximale Amplitude des Aktuators: ±100 mm, Anzeigegenauigkeit: ±0,5 %FS.
4. Betriebsbereich: 0–20 Hz.
5. Steuermodus: Laststeuerung, Verschiebungssteuerung;
6. Haupttestwellenform: Sinuswelle, Rechteckwelle, Dreieckswelle, Schrägwelle und externe Eingangswellenform;
7. Einzelmaschinenleistung: 11 kW
8. Leistung einer einzelnen Stromquelle: 10 kW
9. Gesamtabmessungen 750*700*2700 und 750*700*2250