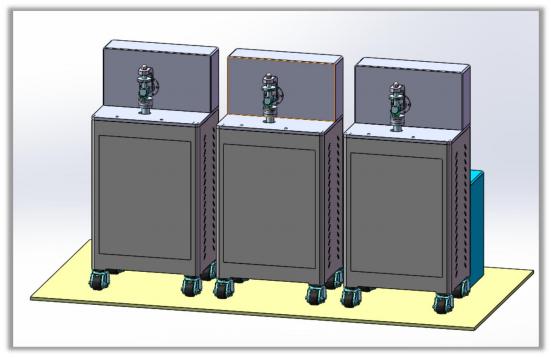
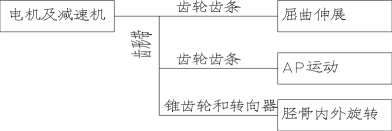
HK Der 3-Kniegelenk-Verschleißtester besteht aus drei Teilen: Testhost, Vorrichtung und elektronischem Steuerteil. Es kann den Verschleiß, die Ermüdung und das Abblättern von Knieimplantaten sowie andere Schadensprozesse simulieren und drei Kniegelenke gleichzeitig auf Implantate testen.

1 .1 Funktionen
Der Kniegelenkverschleißtester HK 3 besteht aus drei Teilen: Testhost, Vorrichtung und elektronischem Steuerteil. Es kann den Verschleiß, die Ermüdung und das Abblättern von Knieimplantaten sowie andere Schadensprozesse simulieren und drei Kniegelenke gleichzeitig testen. Diese Prüfmaschine regelt automatisch Prüfkraft, Prüfzeit und -geschwindigkeit und misst Prüfkraft und Prüfdrehmoment in Echtzeit. Es gilt für die Herstellung, Verwendung und Forschung von Kniegelenkprothesen und anderen verwandten medizinischen Bereichen.
Der Spindelantrieb verwendet einen importierten AC-Servomotor und ein Steuersystem, das eine stufenlose Geschwindigkeitsregelung und die erforderliche Leistung realisieren kann. Berechnen Sie das konstante Drehmoment/die konstante Axialkraftausgabe innerhalb des Geschwindigkeitsbereichs. Die Prüfkraft wird über ein Schraubenfedersystem aufgebracht. Die Prüfkraft wird gleichmäßig und zuverlässig aufgebracht und kann vom Bediener über die Computerschnittstelle eingestellt werden; Die Spindelgeschwindigkeit, die Parameter wie die Anzahl der Umdrehungen, die Testkraft und die Testzeit werden alle von einem Computer gesteuert, der Testdaten in Echtzeit sammeln und grafisch darstellen kann. Die entsprechende Testkurve kann erstellt und die Testdaten oder die Testkurve nach Belieben gespeichert, abgerufen und ausgedruckt werden.
Drei-Wege-Servomotor-angetriebenes Belastungssystem mit verschiedenen Komponenten für komplette Gelenk-AP, Rotation, Flexion, Abduktion und andere Bewegungen. Das Vierkomponenten-Kraftsensormodul testet Drehmoment, Axialkraft, horizontalen Schub und Flexion bzw. Drehmoment während der Extension , Drei-Wege-Servobaugruppe, ausgestattet mit hochpräzisem Drehgeber, Echtzeit-Winkelmessung und Verschiebung und bietet eine effektive Datenquelle für die Host-Computersteuerung.
Jeder Bewegungsmechanismus wird unabhängig gesteuert und koordiniert, mit drei Stationen und 15 Achsen, um den Schadenstest für das Schleifen von Gelenkkomponenten durchzuführen.
1.2 Hauptspezifikationen
1. Gerätebetriebssoftware mit chinesischer Bedienoberfläche.
2. Die Betriebssoftware des Geräts ist einsatzbereit, es ist keine spezielle Software erforderlich.
3. Freiheitsgrade: Jede Teststation kann Flexion/Extension, Innenrotation/Außenrotation, Vorwärts-/Rückwärtsbewegung, dreidimensionale Bewegungssteuerung und axiale Kraftbelastung realisieren, und jeder Freiheitsgrad kann sein kontrolliert. Sowohl der Sensor als auch die Kraft werden erfasst; freie Bewegung in Ein-/Auswärtsrichtung und Ein-/Auswärtsrichtung ist möglich.
4. Die Nichtlinearität des Sensors beträgt nicht mehr als 0,10 % des Skalenendwerts und die Hysterese beträgt nicht mehr als 0,10 %, die Wiederholbarkeit beträgt nicht mehr als 0,05 % des Skalenendwerts.
5. Verschiebungs- und Verschiebungssensorbereich: axiale Verschiebung 100 mm, Flexion/Extension 120, Innenrotation/Außenrotation 20, vordere/hintere Verschiebung 15 mm, mediale/laterale Verschiebung 5 mm, Inversion/Valgus.
6. Lastkapazität und Kraftsensorbereich: Axiallast 3KN, internes/externes Drehmoment 20Nm, Vorwärts-/Rückwärtslast 1KN.
7. Genauigkeit der Kraft- und Wegsteuerung: Der Fehler der Kraft- und Wegamplitude innerhalb eines Zyklus darf das angegebene Maximum nicht überschreiten. Der maximale Phasenfehler darf 3 % des gesamten Zyklus nicht überschreiten. Das Instrument wird gemäß ISO 14243-1 und ISO 14243-3 in jedem kontrollierbaren Freiheitsgrad getestet. Messkurven und Abweichungswerte von Kraft- und Wegsensoren.
8. Es verfügt über eine Achtkanal-Analogeingangsfunktion und kann mit externen Daten synchronisiert werden.
9. Testfrequenz: 1 Hz, Genauigkeit 0,1 Hz.
10. Steuerungssystem: Es sollte mit einem separaten Mehrstationen-Mehrkanal-Servocontroller ausgestattet sein, um eine automatische Regelung von Kraft und Verschiebung zu erreichen.
11. Der Controller sollte in der Lage sein, einen Spitzenwert-Steuerausgleich durchzuführen, um sicherzustellen, dass der vom Signal geforderte Spitzenwert genau erreicht werden kann, wenn eine zyklische Wellenform als Steuerbefehl verwendet wird.
12. Es sollte in der Lage sein, Programmiertests von benutzerdefinierten Gangkurven zu implementieren; in der Lage sein, jeden kontrollierbaren Freiheitsgrad Schritt für Schritt manuell zu steuern; und in der Lage sein, Rohdaten im Excel-Format zu exportieren.
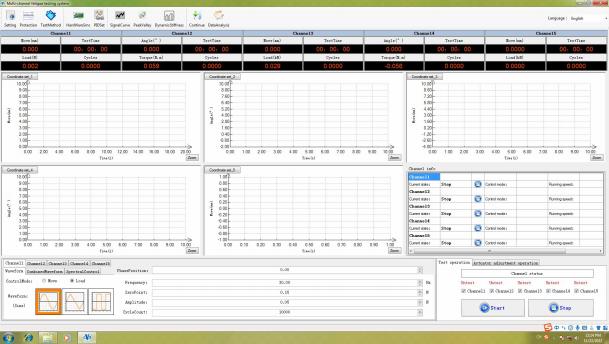
13. Während des Tests sollte die Software in der Lage sein, die Kraft- und Wegkurven jeder Station und des Steuerungssystems in Echtzeit wiederzugeben. Das System sollte in der Lage sein, die Bewegungskurve der Probe ohne manuellen Eingriff automatisch an die Zielkurve anzupassen.
14. Echtzeit-Regelungsrate ≤ 6 kHz, mit Ausnahme des Kraft- und Wegregelungsmodus sollte der Regler in der Lage sein, den berechneten Variablenregelungsmodus zu implementieren.
15. Die digitale Abtastfrequenz sollte nicht weniger als 100 kHz betragen und die Abtastmethode sollte Folgendes umfassen: Spitzenwert, Talwert, Zeit, Maximum, Minimum, Durchschnitt, Zyklus/Logarithmus usw.
16. Es verfügt über einen Dual-Modus, einen Kanal-Feedback-Limit-Kanal-Befehls-Arbeitsmodus.
17. Es hat die Funktion, die fehlende Sensorerregung selbst zu überprüfen.
18. Temperatur: Die Temperatur des Schmiermediums kann bei (37 °C) gehalten werden und es gibt ein Temperaturkontrollsystem.
19. Schmiermedium: Die Gelenkoberfläche kann in das Schmiermedium eingetaucht werden, und das Schmiermedium sollte ohne Leckage abgedichtet werden; und mit einer Leckageüberwachungseinrichtung ausgestattet.
20. Testkomponenten: Ausgestattet mit den notwendigen Werkzeugen zum Testen, Beladen von Arbeitsplätzen und Beladen für alle Bewegungen. Der Taucharbeitsplatz stellt Referenzstandardproben für die Gerätekalibrierung und Fehlerbehebung bereit.
21. Not-Aus-Taste: Das Gerät sollte mit einer Not-Aus-Taste ausgestattet sein.
22. Sicherheitsschutz: Das Gerät sollte mit einer klaren und transparenten Schutzhülle aus thermoplastischem Polycarbonat ausgestattet sein; Es gibt eine Sicherheitsverriegelungsvorrichtung. Wenn die Schutztür geöffnet wird, sollte das Gerät in der Lage sein, den Test automatisch zu stoppen.
1.3 Arbeitsbedingungen
Bei Raumtemperatur Im Bereich von 10 ℃~ 35 ℃;
Die relative Luftfeuchtigkeit beträgt nicht mehr als 80 %;
Ordnungsgemäße Installation auf einem soliden Fundament;
In einer sauberen Umgebung ohne Vibrationen, korrosive Medien und starke elektromagnetische Feldstörungen;
Der Schwankungsbereich der Versorgungsspannung sollte die Nennspannung  10 % nicht überschreiten.
10 % nicht überschreiten.
2. Strukturelle Zusammensetzung
Die Testmaschine ist in drei Arbeitsstationen unterteilt: das Spindelantriebssystem, das Probenladesystem und die Axialkraft. Die drei Arbeitsstationen teilen sich den gleichen Spindelantrieb. Dynamisches System und Softwaresteuerungssystem.
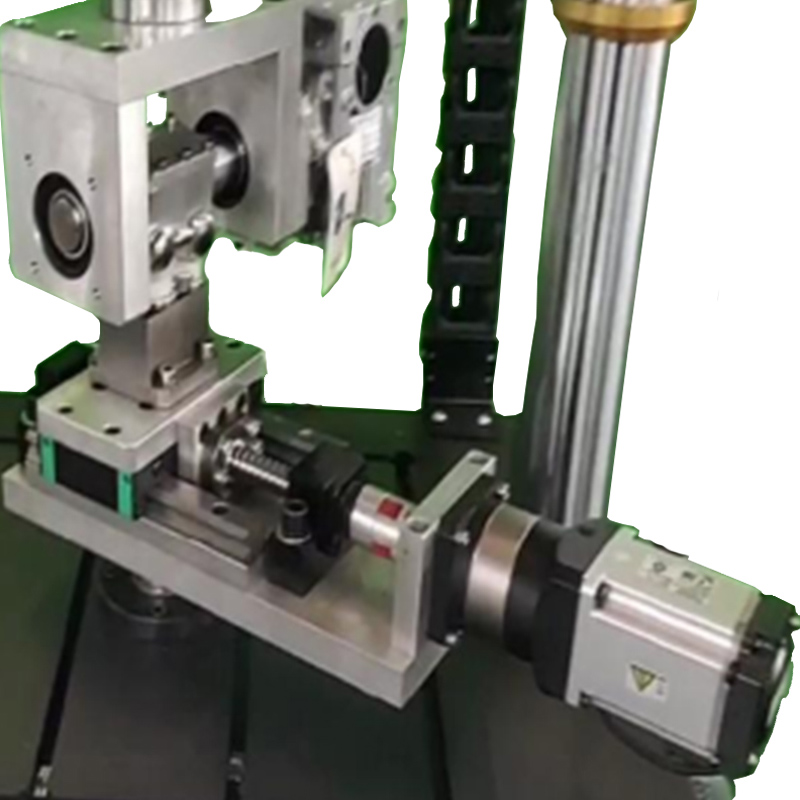
2.1 Spindelantriebssystem
Der Achsmotor verwendet ein integriertes Geschwindigkeitsregelungssystem und einen Motor mit AC-Servo von Panasonic. Die maximale Motorleistung beträgt 7,5 kW, seine Leistung ist auf 3 Ausgangsleitungen aufgeteilt.
Das erste: Nach der Zahnstange, der elektromagnetischen Kupplung und dem Drehmomentsensor wird es zum rotierenden Pendel des Femurs. Die elektromagnetische Kupplung ist für die Steuerung des Ein- und Ausschaltens verantwortlich, und der Drehmomentsensor ist dafür verantwortlich Messung des Drehmoments. Messen Sie das Drehmoment während des Betriebs.
Das zweite: Nach dem Durchlaufen des Zahnriemens und der Zahnstange wird es zu einer Hin- und Herbewegung nach links und rechts, die die AP-Bewegung der Probe antreibt.
Der dritte Punkt: Durch den Zahnriemen, das Kegelrad und das Lenkgetriebe wird er in die Rotationsschwingung des Schienbeins umgewandelt, wodurch die Probe nach innen und außen gedreht wird.
Der Übertragungsweg ist in der folgenden Abbildung dargestellt.
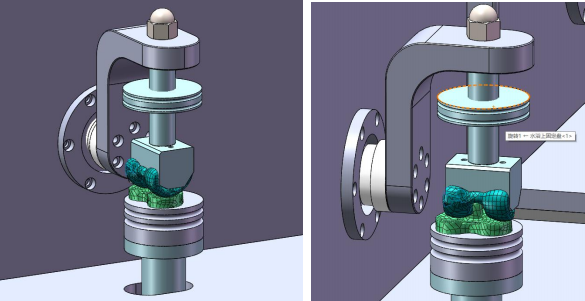
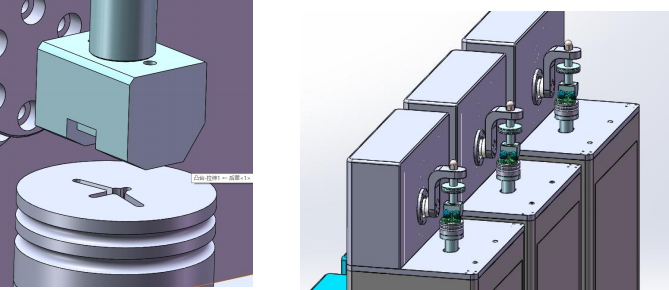
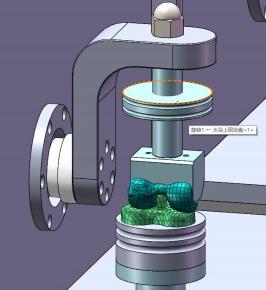
2.2 Probenladesystem
Das Probenladesystem simuliert die Bewegungsfreiheit unter menschlichen Bedingungen für die Implantatkomponenten des Kniegelenks. Es wird installiert und fixiert. Es besteht aus einem Montagesitz, einem Schiebesitz, einem Nylonsitz, einer Rolle, einer Schiebehülse usw.
Die spezifische Implementierung lautet wie folgt:
Der Einbau des Kniegelenk-Verschleißwerkzeugs ist relativ kompliziert. Bitte installieren Sie es streng nach dem Diagramm. Zusätzlich sind die entsprechenden Kanäle beigefügt.
Bitte verwenden Sie beim Anschließen der Drähte die entsprechende Kabelnummer.
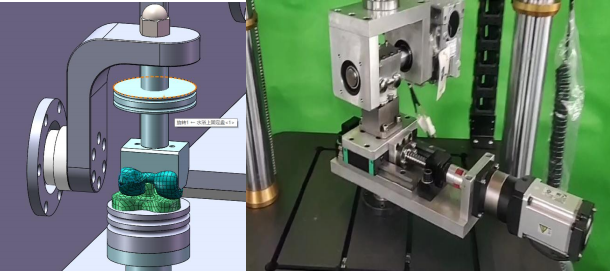
(Die in der Abbildung gezeigte Struktur dient nur zur Demonstration des Bewegungsprinzips, das tatsächliche Objekt hat Vorrang)
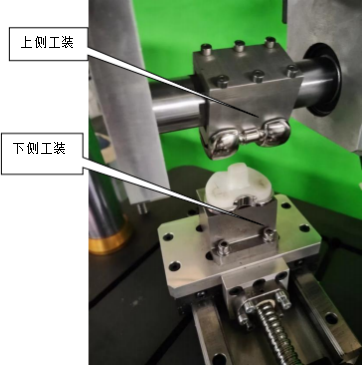

(Die in der Abbildung gezeigte Struktur dient nur zur Demonstration des Bewegungsprinzips, das tatsächliche Objekt hat Vorrang)
Sie müssen das obere und untere Werkzeug entsprechend dem Muster erneut bearbeiten, um die Testanforderungen zu erfüllen. (Details zur Produktgröße variieren)

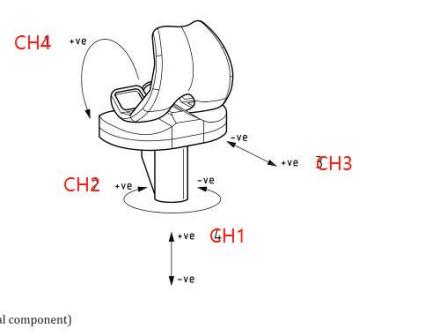
6. Kanalauswahl und zugehörige Anpassungen
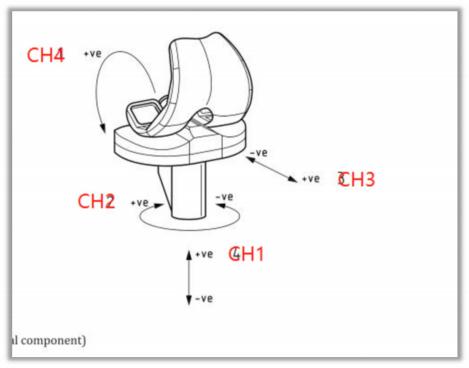
Überprüfen Sie in Kombination mit dem obigen Bild, welcher Kanal funktioniert, indem Sie den Kanal überprüfen. Wählen Sie bei der Ausführung von ISO 14243.3 1-4 Gang aus. Kanal 5 ist ein Erweiterungskanal für nachfolgende Upgrades. Für andere einachsige oder zweiachsige Experimente wählen Sie bitte den entsprechenden Kanal aus.
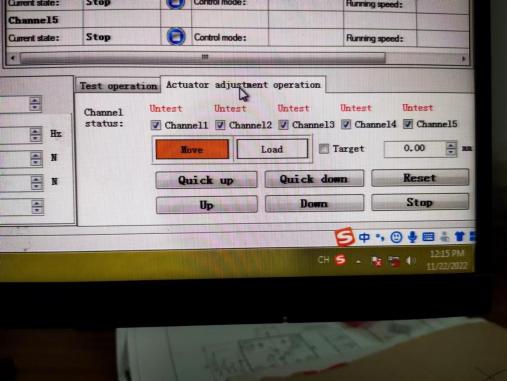
Quick up/up = schnelles Laden/Laden
Schnell ab/ab = Schnell ab/ab
7. Entsprechend ISO 14243.3 muss die Steuerwellenform importiert werden, wie in der Abbildung gezeigt:
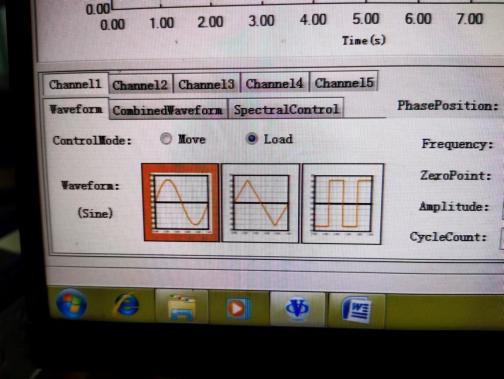
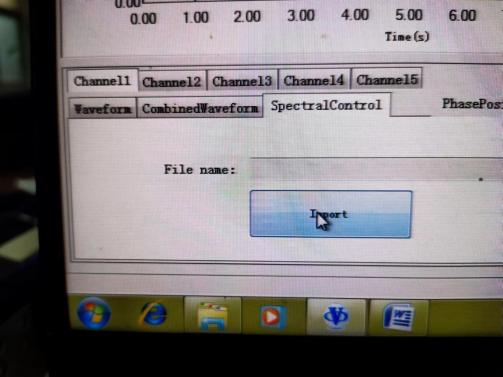
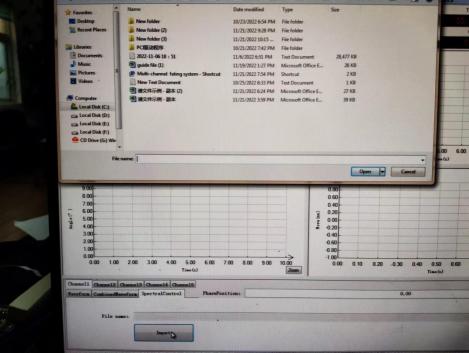
Wählen Sie die werkseitig voreingestellte Wellenform aus. Wenn Sie eine neue Wellenform oder Aktion festlegen müssen, können Sie dies in dieser Datei tun. Ändern und unter einem anderen Namen speichern.
Detaillierte Einstellungen für jeden Kanal finden Sie im Handbuch der Einzelkanal-Software.
8. Über den Schutz:
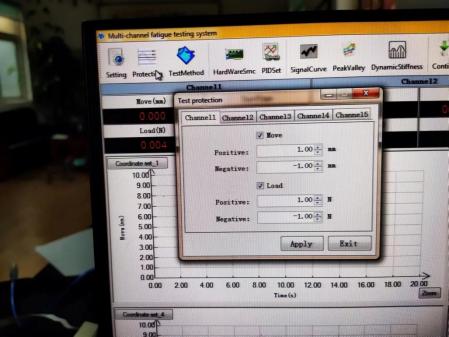
Das Experiment wird nicht verschoben oder kann nicht ausgeführt werden, nachdem auf „Start“ geklickt wurde. Überprüfen Sie, ob in den Schutzoptionen Parameter außerhalb der Toleranz festgelegt sind.
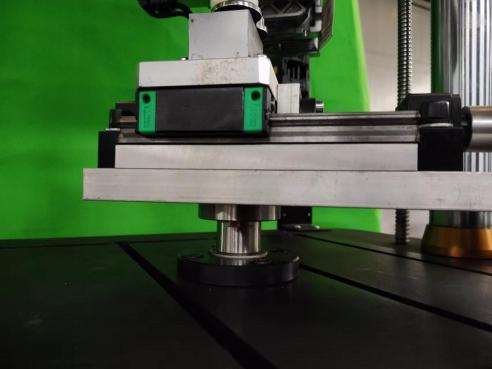
2.3 Axialkraftbelastungssystem
Diese Maschine verfügt über eine Federladestruktur. Der Lademechanismus wird von einem Schrittmotor angetrieben, der über einen kreisförmigen Zahnriemen, eine Synchronriemenscheibe und ein Paar Präzisionskugelumlaufspindeln übertragen und von einer Präzisionsführungsschiene mit linearer Bewegung geführt wird, um den Kraftanwendungssitz anzutreiben. Der kraftbeaufschlagende Sitz ist mit einem federbelasteten Mechanismus befestigt, der nach dem Zusammendrücken der Feder Kraft auf die verschiebbare Plattform ausübt. Es entsteht die Prüfkraft zwischen den Reibflächen der Rollenprobe. Durch die Steuerung des Motors, um den Kraftsitz so anzutreiben, dass er sich im Raum vorwärts und rückwärts bewegt, können die Anwendung und die Größe der Testkraft gesteuert werden. Auf der Ebene des Krafteinleitungssitzes ist ein Lastsensor installiert. Sammeln Sie Kraftsignale. Die lineare Lagerführung gewährleistet die Anwendung und Stabilität der Prüfkraft. Federbelastendes Teil. Einfaches Be- und Entladen.
Wenn die Prüfkraft zu wirken beginnt, gibt der Sensor den voreingestellten Druck in das Mikrocomputer-Steuerungssystem ein und der voreingestellte Druck wird dann vom Mikrocomputer so gesteuert, dass der Motor umkehrt, bis der Systemdruck mit dem voreingestellten Druck ausgeglichen ist.
2.4 Load Soaking System
einer Immersionsflüssigkeitsbox, einer Heizung, eines Temperatursensors, einer peristaltischen Pumpe, eines Silikonschlauchs usw.
Kunden können Positionierungslöcher auf der zylindrischen Endfläche entsprechend der tatsächlichen Größe der Probe bearbeiten und der Klemmwinkel ist einstellbar. Nachdem Sie den Winkel eingestellt haben, verriegeln Sie den linken Positionierungsschieber.



2.5 Software-Steuerungssystem
Das Steuerungssystem ist auf der Steuerungsmaschine installiert und über ein Kommunikationskabel mit dem Testhost verbunden. Die Software-Betriebsumgebung ist WINDOWS XP. Die Steuerungssoftware ist eine grafische interaktive Bedienoberfläche, die für das Senden von Anweisungen zur Steuerung des Systemstarts und -stopps, der Betriebsgeschwindigkeit, der Belastungskraft und der Immersionsflüssigkeitstemperatur sowie für die Erfassung von Systembetriebsdaten wie Axialkraft, Drehmoment, Temperatur und Testzeit verantwortlich ist usw. während des Tests. Nach der Berechnung und Verarbeitung werden die Prüfkraft-Zeit-, Drehmoment-Zeit- und andere Datenkurven in Diagrammform ausgegeben.
Überprüfen Sie in Kombination mit dem obigen Bild den Kanal, um festzustellen, welcher Kanal funktioniert. Wählen Sie bei der Ausführung von ISO 14243.3 1–4 Kanäle, 5 bis . Der Kanal ist ein Erweiterungskanal für nachfolgende Upgrades. Für andere einachsige oder zweiachsige Experimente wählen Sie bitte den entsprechenden Kanal aus.
Quick up/up = schnelles Laden/Laden
Schnelles Herunterfahren/Herunterfahren = schnelle Deinstallation/Deinstallation
7. Entsprechend ISO 14243.3 muss die Steuerwellenform importiert werden, wie in der Abbildung gezeigt:
Wählen Sie die werkseitig vorgefertigte Wellenform aus. Wenn Sie eine neue Wellenform oder Aktion festlegen müssen, können Sie diese in dieser Datei ändern. Unter einem anderen Namen speichern.
Detaillierte Einstellungen für jeden Kanal finden Sie im Handbuch zur Einzelkanal-Software.
8. Über den Schutz:
Das Experiment wird nicht verschoben oder kann nicht ausgeführt werden, nachdem auf „Start“ geklickt wurde. Überprüfen Sie, ob in den Schutzoptionen Parameter außerhalb der Toleranz festgelegt sind.
 Zweikanal- und Balance-Bar-Ermüdungsprüfmaschine
Zweikanal- und Balance-Bar-Ermüdungsprüfmaschine
 Maschinen zur Prüfung der hin- und hergehenden Reibung von Zahnmaterialien
Maschinen zur Prüfung der hin- und hergehenden Reibung von Zahnmaterialien
 Rotationsbiegeermüdungsprüfmaschine
Rotationsbiegeermüdungsprüfmaschine
 Biegeermüdungsprüfmaschine für Knochenplatten
Biegeermüdungsprüfmaschine für Knochenplatten
 Scherprüfmaschine für intramedulläre Nägel
Scherprüfmaschine für intramedulläre Nägel
 Kompressions- und Torsionsermüdungsprüfmaschine für das interne Fixationssystem der Wirbelsäule
Kompressions- und Torsionsermüdungsprüfmaschine für das interne Fixationssystem der Wirbelsäule